Siirry takaisin
LISÄTIEDOT
| TUOTTEEN LISÄTIEDOT | |||||||||
|
|||||||||
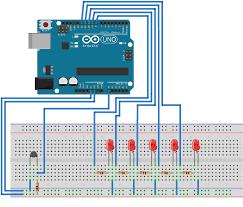
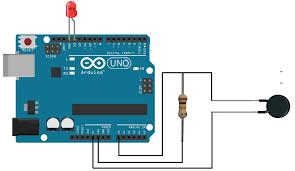
| Tuotteen kuvaus: http://wch.cn/download/CH341SER_ZIP.html Suoritin ATmega2560 Käyttöjännite 5V Käyttöjännite (suositeltu) 7-12V Digitaalisten ulostulojen määrä 54 (joista 15 kpl voidaan käyttää PWM-ulostuloina) PWM Digitaaliset I/O ulostulot 15 kpl Analogiset sisääntulot 16 kpl DC-virta per I/O Pin 20 mA DC-virta 3.3V Pin:lle 50 mA Flash muisti 256 KB (ATmega328P), josta 8 KB käyttää bootloader SRAM 8 KB EEPROM 4 KB Kellotaajuus 16 MHz Pituus 101,52 mm Leveys 53,3 mm Paino 37 g Mukana ohjelmointikaapeli #include #include #include #define LDRPIN A1 #define POTPIN A0 #define HALPIN A3 // These constants won't change. They're used to give names to the pins used: const int analogInPin = A1; // Analog input pin that the potentiometer is attached to const int analogOutPin = 9; // Analog output pin that the LED is attached to int sensorValue = 0; // value read from the pot int outputValue = 0; // value output to the PWM (analog out) LiquidCrystal lcd(12,11,5,4,3,2); OneWire ds(8); Servo servo; uint8_t STEPPINS[4] ={50,52,51,53}; void setup() { int i; // initialize serial communications at 9600 bps: Serial.begin(115200); Serial.println(__FILE__); Serial.println(LED_BUILTIN); lcd.begin(20,4); lcd.print("Hello Bebek"); Serial.print("Init STEP MOTOR"); for(i=0;i<4;i++){ pinMode(STEPPINS[i],OUTPUT); Serial.println(STEPPINS[i]); } for(i=0;i<4;i++){ Serial.println(STEPPINS[i]); digitalWrite(STEPPINS[i],1); delay(500); digitalWrite(STEPPINS[i],0); delay(500); lcd.print("."); } Serial.print("Init DS18B20:"); Serial.println(ds1820(1)); Serial.println("Init Servo"); servo.attach(9); Serial.println("Init pir pin 7"); pir(0); } uint8_t *DDR[8] = {&DDRA,&DDRB,&DDRC,&DDRD,&DDRE,&DDRF,&DDRG,&DDRH}; void exec(char *bf) { Serial.println(bf); char ch=*bf++; char *cp=bf; int v,v2; while(isspace(*cp)) cp++; v = strtol(cp,&cp,0); v2 = strtol(cp,&cp,0); switch(ch){ case 's':pinMode(v,OUTPUT);digitalWrite(v,1);break; case 'c':pinMode(v,OUTPUT);digitalWrite(v,0);break; case 'g':pinMode(v,INPUT_PULLUP);Serial.println(digitalRead(v));break; case 'a':pinMode(v,INPUT_PULLUP);Serial.println(analogRead(v));break; case 'p':analogWrite(v,v2);break; case 'A':if(*bf) {DDRA=0xff;PORTA=v;}else{DDRA=0x00;Serial.print("0x");Serial.println(PORTA,HEX);};break; case 'B':if(*bf) {DDRB=0xff;PORTB=v;}else{DDRB=0x00;Serial.print("0x");Serial.println(PORTB,HEX);};break; case 'C':if(*bf) {DDRC=0xff;PORTC=v;}else{DDRC=0x00;Serial.print("0x");Serial.println(PORTC,HEX);};break; case 'D':if(*bf) {DDRD=0xff;PORTD=v;}else{DDRD=0x00;Serial.print("0x");Serial.println(PORTD,HEX);};break; case 'E':if(*bf) {DDRE=0xff;PORTE=v;}else{DDRE=0x00;Serial.print("0x");Serial.println(PORTE,HEX);};break; case 'F':if(*bf) {DDRF=0xff;PORTF=v;}else{DDRF=0x00;Serial.print("0x");Serial.println(PORTF,HEX);};break; case 'G':if(*bf) {DDRG=0xff;PORTG=v;}else{DDRG=0x00;Serial.print("0x");Serial.println(PORTF,HEX);};break; case 'H':if(*bf) {DDRH=0xff;PORTH=v;}else{DDRH=0x00;Serial.print("0x");Serial.println(PORTH,HEX);};break; default: Serial.println("(c) martti@lumme.org should be added when copied " __DATE__); } Serial.print("%"); } void ldr() { int v = analogRead(LDRPIN); lcd.setCursor(0,1); lcd.print("LDR:"); lcd.print(v);lcd.print(" "); } void pot() { int v = analogRead(POTPIN); lcd.setCursor(0,2); lcd.print("POT:"); lcd.print(v);lcd.print(" "); } void hal() { int v = analogRead(HALPIN); lcd.setCursor(0,3); lcd.print("HAL:"); lcd.print(v);lcd.print(" "); } int timer; void tim() { lcd.setCursor(13,0); lcd.print("TIM:"); lcd.print(timer++); } void cmd() { static char bf[80]; static uint8_t bp=0; while(Serial.available()){ char ch = Serial.read(); switch(ch){ case '\n': case '\r': bf[bp] = 0; bp = 0; exec(bf); break; default: bf[bp++] = ch; if(bp>=sizeof(bf)-1) bp = sizeof(bf)-1;; } } } int dir=0; int vel=1; void stepper() { static long steptime=0; static int phase=0x7; int i; if(!timeout(steptime)) return; steptime = timeset(1); if(dir){ phase <<= 1; if(phase & 0x100) phase++; }else{ i= phase&1; phase >>=1; if(i) phase |= 0x80; else phase &= ~0x80; } for(i=0;i<4;i++) digitalWrite(STEPPINS[i],(phase>>(i+i))&1); } void pir(int run) { static unsigned int last=0; static int alarms=0; if(!run) pinMode(7,INPUT_PULLUP); last<<=1; last += !digitalRead(7); if(last!=15) return; alarms++; lcd.setCursor(10,2); lcd.print(alarms); lcd.print("#"); } int ds1820(int show) { byte i; byte present = 0; byte data[12]; byte addr[8]; int16_t temp; if ( !ds.search(addr)) { if(show)Serial.print("No more addresses.\n"); ds.reset_search(); // delay(250); return; } if(show){ Serial.print("R="); for( i = 0; i < 8; i++) { Serial.print(addr[i], HEX); Serial.print(" "); } if ( OneWire::crc8( addr, 7) != addr[7]) { Serial.print("CRC is not valid!\n"); return; } if ( addr[0] != 0x28) { Serial.print("Device is not a DS18B20 family device.\n"); return; } // The DallasTemperature library can do all this work for you! } // delay(1000); // maybe 750ms is enough, maybe not // we might do a ds.depower() here, but the reset will take care of it. present = ds.reset(); ds.select(addr); ds.write(0xBE); // Read Scratchpad if(show){ Serial.print("P="); Serial.print(present,HEX); Serial.print(" "); for ( i = 0; i < 9; i++) { // we need 9 bytes data[i] = ds.read(); Serial.print(data[i], HEX); Serial.print(" "); } Serial.print(" CRC="); Serial.print( OneWire::crc8( data, 8), HEX); Serial.println(); } temp = data[1]; temp<<=8; temp+=data[0]; Serial.println(temp); ds.reset(); ds.select(addr); ds.write(0x44,1); // start conversion, with parasite power on at the end lcd.setCursor(10,1); lcd.print((float)temp/16); lcd.print(" C "); return temp; } int timeout(long l){ l = millis()-l; return l>0; } long timeset(long l){ return millis()+l; } void loop() { static long ticktime; cmd(); if(timeout(ticktime)){ ticktime=timeset(1000); tim(); ldr(); pot(); hal(); ds1820(1); if(timer%5==0) dir^=1; } servo.write(analogRead(POTPIN)>>4); stepper(); pir(1); } |
|||||||||
 |
|||||||||
 |
|||||||||
 |
|||||||||
 |
|||||||||
 |
|||||||||
